





2026 Top 3D Vision Systems for Robots What You Need to Know?
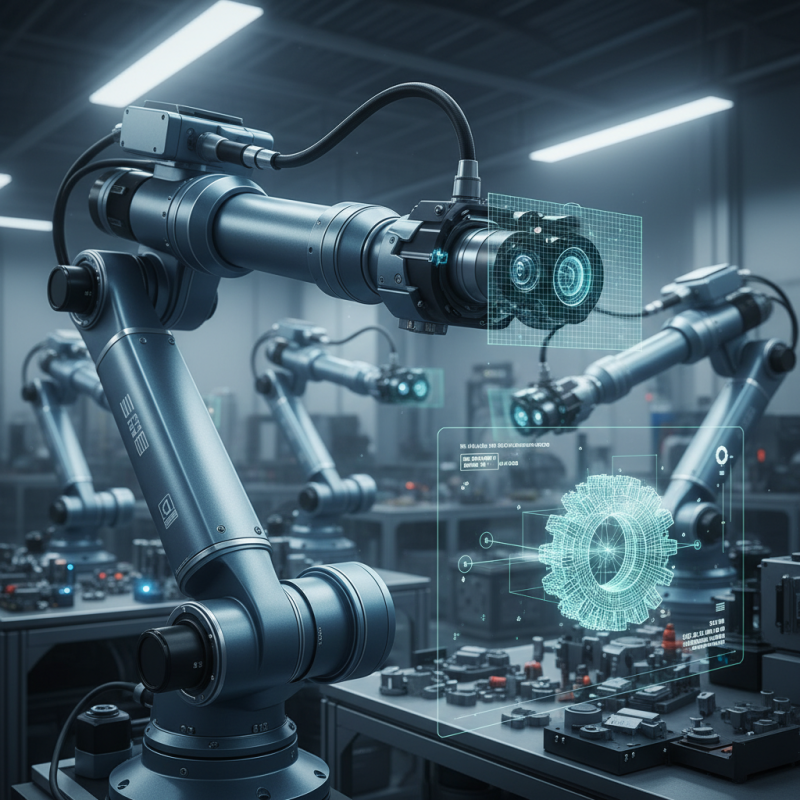
In the evolving landscape of robotics, 3D vision systems for robots play a crucial role. These systems provide machines with the ability to perceive depth and spatial relationships, enhancing their interaction with the environment. With cutting-edge technology, they enable robots to execute complex tasks.
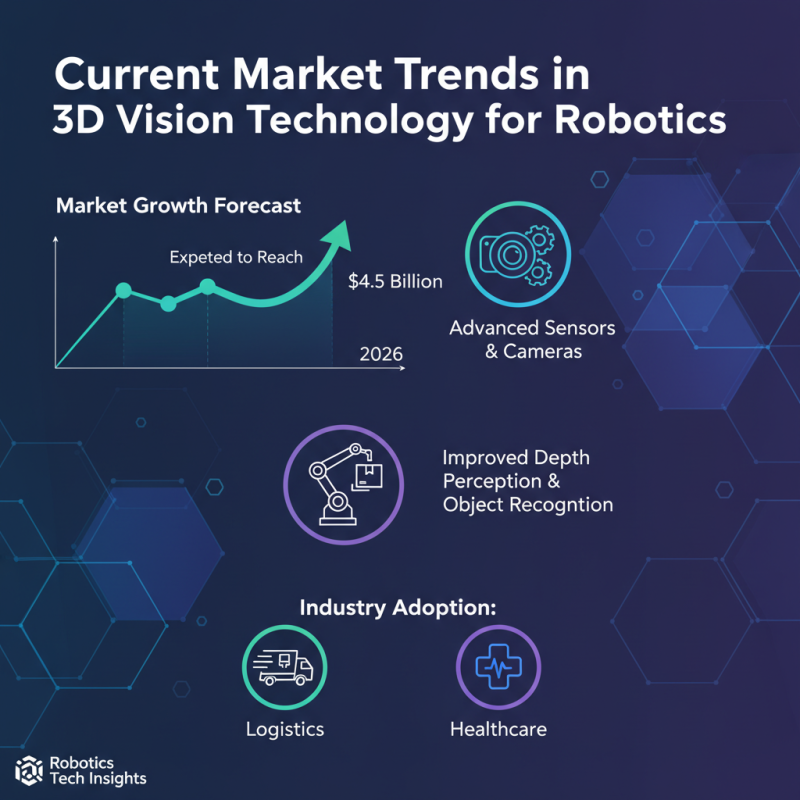
Many industries now rely on these advanced systems. From manufacturing to agriculture, robots equipped with 3D vision are transforming operations. However, implementing these technologies is not always straightforward. Challenges with calibration and environmental factors can hinder performance.
As we explore the top 3D vision systems for robots in 2026, it is essential to address both their potentials and limitations. Understanding how these systems function can lead to improvements. Continuous reflection on their capabilities will allow us to harness their full potential in the future.
Understanding 3D Vision Systems: Definition and Key Components
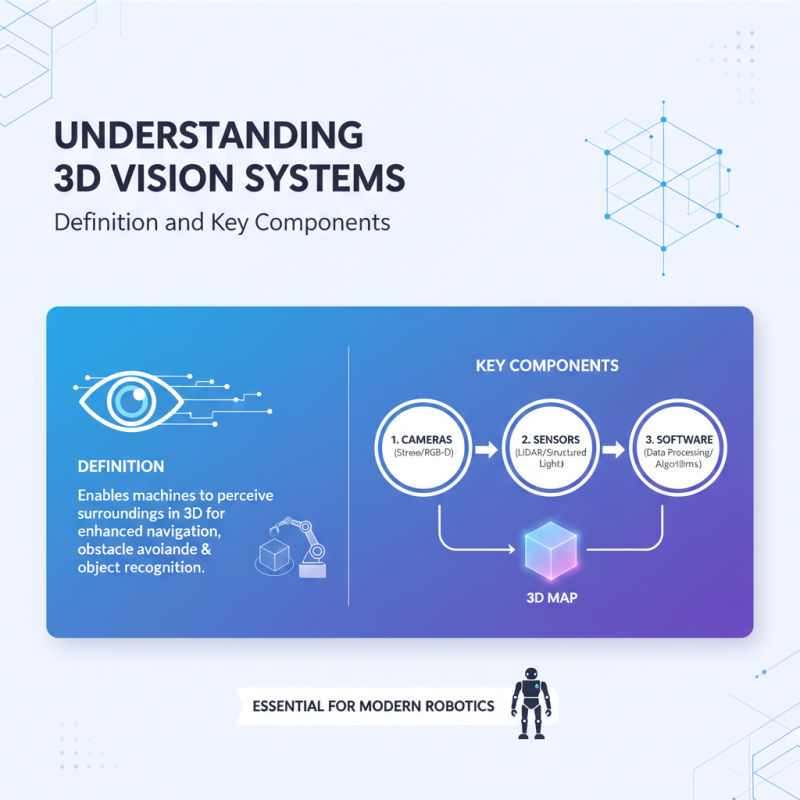
3D vision systems are essential for modern robotics. They allow machines to perceive their surroundings in three dimensions. This technology aids in navigation, obstacle avoidance, and object recognition. A 3D vision system typically comprises cameras, sensors, and software for data processing.
Cameras capture images from different angles. This multi-angle data allows software to reconstruct a 3D map. Sensors, such as LiDAR, enhance depth perception. However, these systems can struggle with low-light conditions or reflective surfaces. Not all environments allow for accurate depth measurement, leading to potential errors.
Moreover, the integration of 3D vision into a robot is complex. It requires precise calibration. Misalignment can result in misinterpretation. Developers must continuously refine these systems to improve accuracy. The technology is promising but not without its challenges.
Related Posts
-
Top 10 Amazing Innovations in Robot Vision Technology You Need to Know
-
Revolutionizing Industries: How Robot Vision Systems Enhance Automation and Efficiency
-
2025 How to Enhance Robotic Performance with 3D Vision Systems in Automation
-

How to Choose the Best Robot Vision System for Your Business Needs
-

How to Use Robotic Vision for Enhanced Automation and Efficiency
-
What is Robotic Vision? Understanding Its Importance and Applications in Automation