





Why Do Robots Need 3D Vision Systems for Enhanced Navigation and Interaction?
In today's rapidly advancing technological landscape, robots are becoming increasingly integral to various sectors. The use of 3D vision systems for robots is crucial for their navigation and interaction capabilities. These systems provide a depth perspective, allowing robots to understand their environment better.
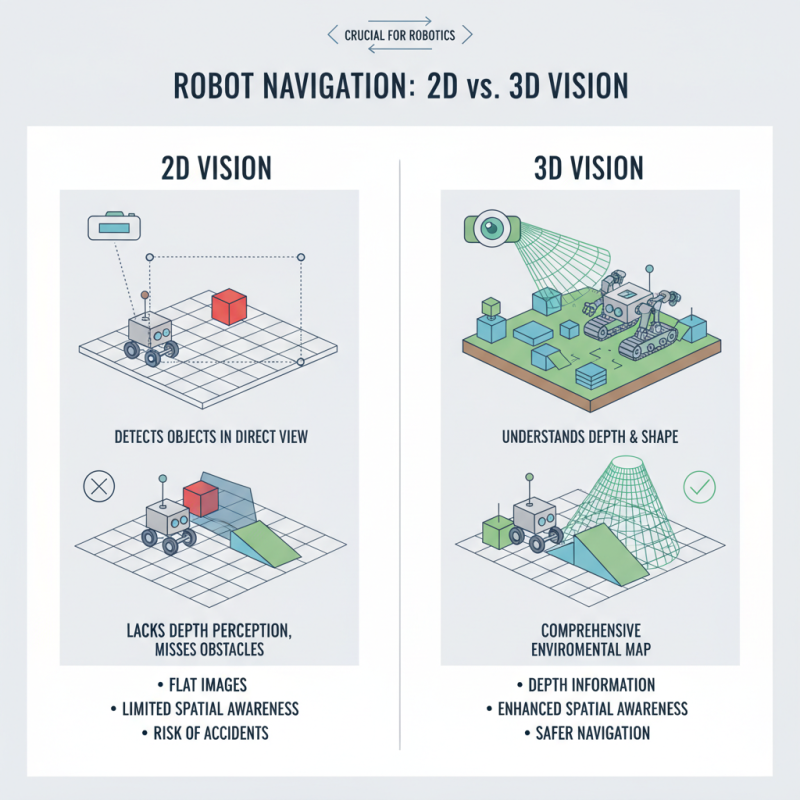
Imagine a robot navigating through a crowded space. It must avoid obstacles, recognize objects, and interact with humans. Traditional 2D sensors often fall short in dynamic settings. They may misinterpret distances or fail to detect nearby obstacles. This highlights a glaring gap in robotic technology.
3D vision systems empower robots to overcome these limitations. They help robots perform complex tasks, such as picking up fragile items or recognizing faces. However, there are imperfections. Not every 3D vision system can interpret all scenarios flawlessly. Robots can misjudge depth or struggle with lighting variations. This ongoing challenge demands further refinement and innovation.

Benefits of 3D Vision Systems in Robotic Navigation

3D vision systems are essential for modern robots. They allow robots to perceive their environment in three dimensions. This capability enhances navigation and interaction significantly. Robots equipped with 3D vision can detect obstacles more accurately. They can navigate complex spaces, like warehouses and homes, with ease. Depth perception is crucial when avoiding collisions. It helps prevent accidents and improves overall safety.
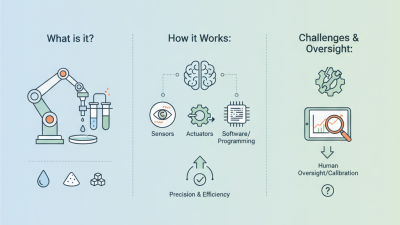
Additionally, 3D vision aids in object recognition. Robots can identify and classify objects better using this technology. They can grasp items more effectively, which is critical in tasks like sorting or delivering. However, implementing 3D vision can be challenging. Algorithms must process vast amounts of data quickly. The technology can be expensive, too. There might be limitations in certain environments, like bright sunlight or low-light conditions, that need attention.
While the benefits are clear, there are still areas for improvement. Calibration of 3D vision systems can be tricky. Small errors in data interpretation can lead to significant issues. It’s essential to continuously refine these systems for better performance. Overall, the potential of 3D vision systems in robotics is immense, but there are hurdles to overcome.
Related Posts
-
Top 10 Amazing Innovations in Robot Vision Technology You Need to Know
-
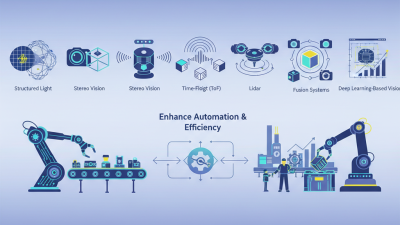
7 Best 3D Vision Systems for Robots: Enhance Automation & Efficiency
-

Exploring the Future of Robotic Laser Welding in Advanced Manufacturing Techniques
-
What is a dispensing robot and how does it work?
-
How to Leverage Robotic Vision for Enhanced Automation in 2025
-
How to Master Robotic Arc Welding: Tips, Techniques, and Best Practices