





电弧焊焊缝跟踪
焊缝跟踪也称为接头跟踪,是指在焊接位置前方进行实时跟踪。这不仅可以校正机器人或专机的轨迹,而且可以实现自适应控制,例如通过调整电压、送丝速度或行走速度来改变焊缝成形。
AUTO-TRAC/E™
专为焊接专机设计的完全3D激光视觉系统,用于焊缝跟踪和自适应过程控制。完全集成的标准系统,包括激光传感器、控制单元、执行器、示教器和即用型软件。AUTO-TRAC/E™设计用于从钣金到厚板复杂坡口的各种接头。

AUTO-TRAC/PLC™
AUTO-TRAC/PLC™是一款功能强大且紧凑的焊缝跟踪系统,用于专机自动化,包括3D激光视觉传感器和软件,提供众多功能,
包括接头视觉分析、两轴轨迹计算、可选的自适应控制等。PLC 可通过ProfiNet I/O与视觉系统接口,控制多达两个轴(执行器)。
QUICK-SCAN™
QUICK-SCAN™是一款紧凑且高性价比的激光视觉系统,用于焊缝寻位、接头装配监控、3D程序偏移、焊缝检测和示教。它包括高速3D机器人表面映射功能,可生成精确点云。QUICK-SCAN™用于需要工艺前后进行测量和检验的应用,同时保持总体空间占用尽可能小。

MICRO-TRAC-CO-S™
用于焊缝跟踪和自适应过程控制的智能3D视觉系统。MICRO-TRAC/CO-S™视觉系统设计用于焊接专机以及客户执行器(不包含在内)可使用CANopen LXM28A施耐德单相伺服驱动系统(不包含在内)。

POWER-TRAC 4.0™
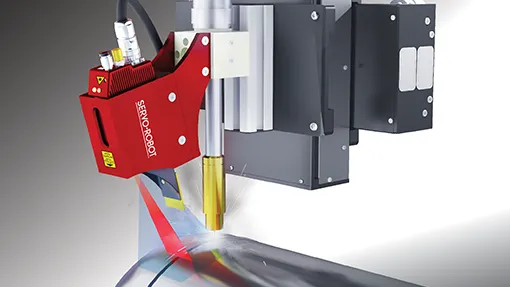
POWER-TRAC 4.0™系统是SERVO-ROBOT提供的用于机器人实时焊缝跟踪、离线焊缝寻位和自适应控制的产品。在焊缝跟踪模式下,连续修正工具轨迹补偿工件焊缝位置变化。在焊缝寻位模式下,先测量工件和/或特征的位置,然后相应地偏移并修正机器人路径。
承蒙 REIS Robotics (China) Co., Ltd. 提供照片
 Co., Ltd.")